Category: STEM (Science, Technology, Engineering and Mathematics)
Review
Application of Ground Penetrating Radar in Warning of Urban Street Tree Collapse: A Review
Aplicación del Radar de Penetración en el Suelo en la Advertencia del Colapso del Arbolado Urbano: Revisión
Chang Liu1 *, Tianqing Ling1
1Nanjing Research Institute of Electronics Technology. 210000 Nanjing, China.
Cite as: Liu C, Ling T. Application of ground penetrating radar in warning of urban street tree collapse: a review. Salud, Ciencia y Tecnología - Serie de Conferencias. 2024; 3:945. https://doi.org/10.56294/sctconf2024945
Submitted: 11-02-2024 Revised: 02-05-2024 Accepted: 17-06-2024 Published: 18-06-2024
Editor:
Dr.
William Castillo-González ![]()
ABSTRACT
The collapse of urban street trees not only jeopardizes public safety and property but also inflicts damage upon the ecological services provided by urban environments. This paper provides a comprehensive review of Ground Penetrating Radar (GPR) technology in the application of early warning systems for the collapse of urban street trees, discussing its principles, strengths, and its historical application within urban forestry. The article further analyzes the challenges and limitations of GPR in current research endeavors and prognosticates future directions for study.
Keywords: Ground Penetrating Radar; Street Tree Collapse; Root System.
RESUMEN
El colapso de los árboles de las calles urbanas no sólo pone en peligro la seguridad pública y la propiedad, sino que también inflige daños a los servicios ecológicos proporcionados por los entornos urbanos. En este artículo se ofrece una revisión exhaustiva de la tecnología de radar de penetración en el suelo (GPR) en la aplicación de sistemas de alerta temprana del colapso del arbolado urbano, y se analizan sus principios, puntos fuertes y su aplicación histórica en el ámbito de la silvicultura urbana. El artículo analiza además los retos y limitaciones del GPR en las investigaciones actuales y pronostica futuras direcciones de estudio.
Palabras clave: Radar de Penetración en el Suelo; Colapso de Árboles; Sistema Radicular; Detección de Raíces.
INTRODUCTION
Amidst the dynamic landscape of global climate change, there has been a noticeable increase in both the frequency and intensity of wind disasters in recent years. Specifically, typhoons have been known to cause significant damage to coastal cities. These powerful natural events result in the collapse and fragmentation of numerous urban trees, leading not only to the deterioration of the city’s horticultural aesthetics but also obstructing essential thoroughfares. Annually, the destruction caused by fierce typhoons on trees, along with subsequent secondary disasters, imposes a substantial toll on regional economies and jeopardizes residents’ lives and property safety. As an essential element of urban greening efforts, trees - particularly street trees - have become integral components of urban development. The continuous expansion of urban areas has resulted in a diverse network of roads and plazas adorned with an increased planting of trees and shrubs that enhance the beauty of cityscapes. However, this growth also amplifies the susceptibility of these street trees to damage from high-velocity winds.
In contemporary urban landscaping, the collapse of roadside trees is often associated with a multitude of factors. Primarily, the technique of deep-pit planting employed for these trees can lead to the accumulation of water around the roots during heavy rainfall, precipitating root decay and rendering the trees susceptible to toppling. Concurrently, the infiltration of water into the soil results in soil loosening, diminishing the root system’s anchoring capacity. The ongoing buffeting by strong winds further softens and loosens the soil, exacerbating the risk of collapse.
Additionally, the growth conditions of urban roadside trees are frequently constricted by suboptimal road soil quality, soil compaction, reduced porosity, poor aeration and drainage, undersized tree pits, and narrow planting strips. The root system’s ability to expand is inhibited by road foundations and subsurface utility infrastructure, while the above-ground portions face restrictions from overhead lines and buildings, among other adverse growth factors. This constriction weakens the trees’ resistance to windthrow, leaving them vulnerable to the harsh soil conditions following strong wind events, which stifle the capacity of plant roots to extend. Moreover, frequent urban road renovations and construction activities often entail road widening or modification, particularly damaging to tree roots during utility line and pavement works. For instance, construction projects commonly sever roots on one side of the roadway, leading to an uneven distribution of the root system and an imbalance in structural support. Given that trees typically have a significant above-ground mass and a high center of gravity, an insufficient subterranean root system fails to adequately anchor and stabilize the tree. Consequently, the likelihood of trees falling towards the roadway under strong winds is greatly increased. Once such trees fall, they usually cannot be righted due to the remaining roots still being embedded in the soil. When fallen trees obstruct traffic, removal is the only solution, which not only elevates urban maintenance costs but also poses safety hazards.
The study demonstrates that root systems play a pivotal role in tree lodging. Root systems are vital organs for plants to absorb nutrients and water from the soil, as well as maintaining plant stability and slope stability. However, compared to the above-ground parts of trees, research on root systems has been relatively lagging. For a long time, observing root structure without damaging the root system and its surrounding environment has been challenging due to technological limitations. This is primarily because it is inconvenient to observe root systems deep beneath the surface. Traditional research methods include root excavation, soil drilling, and soil profile excavation. However, these methods are complex, time-consuming, and costly. Moreover, they pose risks to the underground soil environment and have adverse effects on the properties and conditions of the surface soil. These factors make it impossible to conduct long-term and repetitive observation and research on root systems.(1,2) Based on the non-destructive nature of ground-penetrating radar (GPR), this paper discusses the current challenges of using GPR for underground soil and root detection, as well as the implementation of lodging warning, and provides potential solutions along with some prospects.
Ground Penetrating Radar Fundamentals
GPR technology constitutes a non-destructive geophysical method that employs electromagnetic waves to image the subsurface. GPR’s capability to resolve subsurface features is predicated on contrasting dielectric properties, and as such, finds extensive application across archeology, civil engineering, and environmental studies. Research developments have not only optimized GPR’s resolution and depth of penetration but have also expanded its interpretative algorithms for more precise data analysis.GPR technology has seen substantial refinement since its inception, bolstered by advancements in signal processing and increasing computational power. This synthetical manuscript delineates the fundamental mechanisms underlying GPR operation and examines the methodological improvisations that have augmented its efficacy.
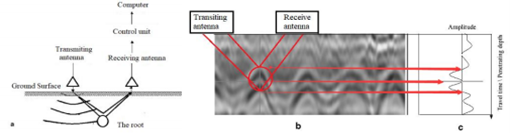
Figure 1. Working principle of GPR
A standard GPR system consists of three basic components: a control unit (including a pulse generator, computer, and associated software), an antenna (including pairs of transmit and receive antennas), and a display unit(3) (Figure 1). GPR operates by emitting high-frequency radio waves (typically in the range of 10 MHz to 2,6 GHz) via an antenna into the subsurface. When these waves encounter material interfaces with varying dielectric constants, they are reflected, refracted, or scattered back to the surface, where they are detected by a receiving antenna. The time delay between transmission and reception is proportional to the depth of the object, thus providing a profile of subsurface anomalies.
Schematic illustration of GPR detection of Caragana microphylla roots in a sandy area in the Inner Mongolia, China: a high frequency electromagnetic pulses emitted from a transmitting antenna reflect off the boundary between soils and roots and then received by a receiving antenna. Time and signal strength are recorded by the control unit; b a raw GPR radargram (B-scan) corresponding to (a), with hyperbolic shaped reflections representing root reflectors ; c a reflected waveform (A-scan) of GPR radargram recording the two -way travel time (i.e., the penetrating depth) on the vertical axis and amplitudes of the return signals along the horizontal axis if the velocity of propagation (V) is known, the depth of the object or interface causing the radar reflection can be resolved:(4)
D = V × t (1)
2
In the above equation, D is the depth and t is the two-way travel time.
Wave speed can be obtained from the following formula:(5)
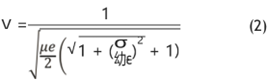
Where μ is the permeability, σ is the conductivity, :is the permittivity, and ω is the angular frequency of the emitted pulse (i.e. 幼 = 2πf , where f is the frequency). For low-conductivity and non-magnetic materials (i.e., σ < < 幼ε and μr = 1, where μr is the relative permeability), the propagation speed can be estimated by the following formula:(6)
![]()
Where c is the speed of light in vacuum (0,2998 m per nanosecond) and εT is the relative dielectric constant. The reflection intensity at the interface of two materials depends on the reflection coefficient R:(3,6)
![]()
Where εr1 is the relative dielectric constant of the soil, εT2 is the relative dielectric constant of the root, Ⅴ1 is the propagation speed of the electromagnetic wave in the soil, and Ⅴ2 is the propagation speed of the electromagnetic wave in the root. Obviously, the relative permittivity of adjacent media determines the intensity of reflected energy.(4) The water content in roots is higher than that in the soil matrix, thus providing the necessary dielectric constant contrast to enable root detection by GPR.(7)
Ground penetrating radar data processing and analysis
Interpretation of GPR data requires an understanding of the geological context, the dielectric properties of the materials under study, and the underlying characteristics of subsurface structures. The collected ground- penetrating radar data is processed to create subsurface images. Signal processing techniques such as time slice analysis and deep slice imaging are used to visualize subsurface characteristics and anomalies. The following is the general process of ground penetrating radar data interpretation:
Data preprocessing: raw ground penetrating radar data is usually preprocessed. This may include correction of system-specific artifacts, filtering to eliminate noise, and adjustments to the measurement geometry. Preprocessing improves data quality and improves the accuracy of subsequent interpretation.
Velocity analysis: the radar signal travels through the medium at a certain speed, depending on the dielectric properties of the underground material. Velocity analysis involves estimating the propagation speed of an electromagnetic wave in a measured area. This information is essential to accurately convert travel time to depth.
Depth calibration: GPR data is collected based on travel times, and converting these times to depth requires an understanding of subsurface electromagnetic wave velocities. Depth calibration involves establishing a relationship between travel time and depth based on the estimated speed.
Recognition of hyperbolic reflections: the most common feature in ground penetrating radar data is hyperbolic reflections, which represent echoes from subsurface interfaces. The hyperbola is caused by the difference in propagation time between the direct wave and the reflected wave. Identify and interpret these hyperbolic reflections to determine the depth and nature of subsurface features.
Layer recognition: ground penetrating radar data often reveals different layers underground. These layers are interpreted in terms of their characteristics, such as amplitude, continuity, and reflection patterns. Layers may correspond to soil layers, geological formations, orman-made structures.
Anomaly detection: anomalies in ground penetrating radar data may indicate the presence of buried objects, voids, or other irregularities. Look for deviations from expected patterns and investigate anomalies to understand their nature and significance.
Mapping subsurface features: interpretation involves creating subsurface maps or profiles that represent the distribution of materials and features. This may include mapping the boundaries of archaeological structures, identifying utility lines or characterizing geological formations.
Integration with other data: GPR data interpretation is generally more reliable when integrated with other geophysical data or information from other sources. Combining GPR results with geological maps, borehole data or satellite images can provide a more complete understanding of the subsurface.
Visualization and reporting: interpretation results are often visualized through deep slicing, time slicing, or 3D reconstruction. Reports can be generated that include explanations, annotated images, and explanations of subsurface features. Taking figure 2 as an example, the electromagnetic pulse is generated at a certain time interval or distance along the direction of the measurement line (Figure 2A A-E), and the cross section of the reflected signal can be recorded. After data processing, the radar map corresponding to each profile is generated (Figure 2B A-E). The radar measurement track line can be integrated into the radar map, which depicts the properties of the point profile on a vertical scale (Figure 2B z direcction), and the two-way propagation time (or approximate depth) is shown on the vertical axis. On the horizontal axis is the surface position (Figure 2B x_direcction).(8,9)
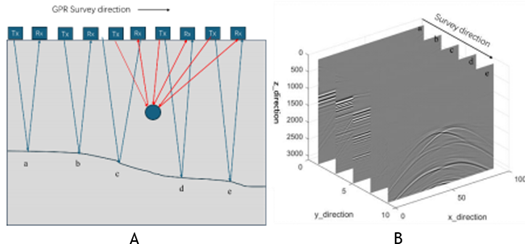
Figure 2. GPR data visualization
Recent advances in GPR data processing and visualization software have facilitated the creation of subsurface 3D pseudo-images (also known as C- scans) by interpolating multiple 3D radar maps.(10) By introducing color as a fourth dimension, buried objects detected by GPR can be depicted in different and interesting ways.
Continuous iteration: data interpretation is an iterative process. Their explanations may need to be revisited and refined in light of additional data, real information, or insights gained during the analysis.
Interpreting ground penetrating radar data requires a combination of technical expertise, field knowledge, and a deep understanding of the specific application. Cooperation between ground-penetrating radar experts, geologists, archaeologists and other relevant professionals is often crucial for accurate and meaningful interpretations.
GPR Use in Urban Forestry
GPR has been used in various applications in the field of urban civil engineering. For example, recent studies have successfully applied non- destructive GPR inspection methods to locate buried services and pipes that may interfere with excavation and construction projects(11) assess the thickness of asphalt pavement surfaces, assess the condition of concrete components, locate and assess hazardous waste, and provide a comprehensive assessment of the material and general geotechnical investigations.(12) GPR has also been successfully used to locate and identify the direction and depth of local tree roots in forests.(13,11,14,15) However, few studies have used GPR to locate and characterize tree roots under urban sidewalks.
However, the identification of other types of roots is relatively extensive. At present, GPR researches on coarse roots mainly focus on the identification and localization of coarse roots and the estimation of root diameter. Butnor et al.(15) used GPR with an antenna frequency of 1 500 MHz to detect roots with root diameter larger than 0,5 cm and could evaluate the total root biomass without dividing the biomass by root size. Guo et al.(14) and Yamase(16) estimated the coarse root diameter by extracting GPR reflected wave parameters and obtained good results. Among them, the time for electromagnetic wave to reach the delay point at the base and the total time interval for reaching the initial point at the top of the root had the most significant positive correlation with root diameter. GPR has been widely used in the study of woodland soil bedrock or soil stratigraphy,(17) but there is a lack of research on the detection of woodland soil gravel. Whether gravel in soil can be reflected in radar images or whether soil roots and gravel can be effectively distinguished is also controversial.
In the initial phase of root studies using GPR, most efforts have been aimed attesting the suitability of GPR for 3D structural imaging of roots.(18,19) In these studies, a GPR system with a central frequency of 450 MHz was used to map the coarse roots of four different tree species under various soil conditions. After data post-processing steps, including signal amplification and migration, the 3D view of the coarse root system was manually redrawn from the GPR radar map. The roots were then digitized to determine coarse root length and coarse root area density at different depths. However, these studies do not provide specific information on how to redraw the root map from the GPR radar map. It appears that the location and diameter of the roots were first estimated on each radar map, and then the roots between adjacent radar maps were subjectively correlated to create a root 3D map.
In addition to rough root mapping, GPR is used to estimate root-related parameters such as coarse root biomass and diameter (which are critical for understanding root function in ecosystems). Butnor et al.(8) first used GPR to estimate coarse root biomass and diameter and developed a framework for quantitative coarse root methods based on GPR. Thanks to advanced GPR data post-processing protocols and new GPR metrics and estimation methods, the accuracy of root-related parameter estimates has improved over the past decade.
Challenges and Limitations
At present, theoretical research on root systems using GPR lags behind its practical applications. Although GPR has achieved certain milestones in the study of plant root systems, it is confronted with numerous limitations and bottlenecks. As a nondestructive instrument, GPR exhibits potential in the detection and quantification of coarse roots; however, its successful utilization is contingent upon site-specific conditions.(20) Consequently, discerning which variables interfere with the reliability of GPR in coarse root detection is of paramount importance. A plethora of factors, such as antenna frequency, soil properties, experimental settings, plant species, sample depth, and the signal filtering process, can influence the efficacy of GPR in root system detection and quantification.(21,22) Even identical indices might yield contradictory outcomes when compared across different studies. For instance, Barton et al.(9) reported poor correlations between root size and the same signal strength indices used by Butnor et al.(8) and Butnor et al.(20) for root diameter estimation in their research. Dannoura et al.(21) and Hirano et al.(22) were unable to achieve high estimation accuracy with the time domain reflectometry indices reported by Barton et al.(9). Hence, determining which GPR index is more suitable for the assessment of coarse root diameters, when contrasted with other indicators, proves to be challenging.
The root system of plants, comprising primary roots, lateral roots, and adventitious roots (fibrous roots), can be categorized into taproot systems and fibrous root systems. Urban street trees predominantly consist of arboreal species, shrubs, and certain herbaceous plants, typified by a taproot system, whereas the majority of monocotyledons possess a fibrous root system. The structure of the root system refers to the topological connections and geometric forms of individual root segments. The diameter of plant lateral roots tends to taper from the point of emergence to the distal end, with each lateral root exhibiting varying growth rates and water content. The electromagnetic properties of roots are primarily determined by the water content within the root system. Due to the variability in water content resultant from different root locations, the electromagnetic characteristics of roots are also subject to fluctuation, thereby precluding the inference of root diameters based on radar data. In urban landscaping, if trees have fewer thick roots which are shallowly distributed (mainly situated about 30 cm below the ground surface), this may present increased difficulty in detection.
Typically, the putative points of root systems acquired by radar present as scattered data, the interrelations of which defy clear determination. Furthermore, it is not feasible to directly infer the growth condition of the root systems solely based on the detected data. Current research endeavors to elucidate root system architecture utilizing GPR technology predominantly rely on hypothetical or empirical growth patterns, rather than on the authentic states of root development.(23) Therefore, while GPR proves effective for ascertaining the location and approximate spatial distribution of plant root systems, the progression from disparate points to a continuous line through methodologies such as interpolation, followed by the inversion of root diameter, and subsequently the generation of a three-dimensional structural form of the root system, still lacks foundational research and model verification. According to contemporary studies, GPR is limited in detecting only the coarser plant roots (with diameters exceeding 2 cm), and many desiccated roots, due to their low moisture content, elude detection.
Ground-penetrating radar is frequently employed for the localization of urban subterranean infrastructure, concrete structures, concrete moisture content, railway and highway subgrade defects, and permafrost roads.(11) In these application scenarios, the objects under investigation typically possess uniform physical characteristics, facilitating relatively straightforward detection. In contrast, plant root systems, as living organisms, exhibit numerous undetermined physical attributes, posing challenges to the precision of ground-penetrating radar detection. Consequently, the study of plant roots needs to be combined with other detection methods to be more accurate and effective.
Current Research and Innovations
Multifrequency and Multidimensional Data Acquisition: the employment of ground-penetrating radar systems with multifrequency antennas and antenna arrays augments the capacity to discern subterranean features at varying depths. Concurrently, multidimensional imaging facilitates the interpretation of intricate subsurface configurations. Nevertheless, due to the theoretical constraints of GPR, a compromise must be struck between elevating antenna frequency to enhance detection resolution and reducing it to extend penetration depth—indicating that GPR may struggle to detect coarse roots buried at substantial depths. However, the application of multifrequency antennas and antenna arrays enables optimization across the entire spectrum of GPR’s penetration and resolution capabilities. It permits simultaneous acquisition of GPR scans using multiple antennas at the same frequency, as well as the amalgamation of separate transmitters and receivers operating at distinct frequencies into a singular antenna array unit. By selecting any combination of transmitters/receivers within the array at will, one can meld probing depth with a satisfactory resolution, thereby enabling the detection of deep-seated coarse roots.
Upgrading Data Processing Algorithms and Models: in an endeavor to enhance the interpretative prowess of GPR data, researchers persist in the development of increasingly sophisticated data processing algorithms. These encompass algorithms rooted in machine learning that autonomously recognize subterranean features while attenuating noise and the incidence of false positives. Concurrently, there is a focus on refining dedicated root- specific GPR data processing programs and devising algorithms for the automated identification of root reflectors and the reconstruction of their three-dimensional structures. Although universal GPR data processing protocols for roots have been established - for example, the protocol employed by Stover et al.(24) the subtleties of data post-processing steps and software vary amongst studies, thereby constraining the potential for cross-study comparisons. Moreover, there is a need for specialized root- centric GPR data analysis software capable of automatically differentiating root reflectors and linking roots across adjacent radargrams, thereby augmenting the potential for accurate three-dimensional reconstruction of coarse roots using GPR.
Developing forward simulation models for the synthesis of root GPR reflections also forms a crucial strategy for enhancing accuracy. Forward simulation is a commonplace technique employed to replicate the response characteristics of significant reflectors on simulated radargrams and delineate the potential and ambiguity inherent in GPR. For controlled quantitative studies of coarse roots based on GPR, only a handful of root samples with known parameters (i.e., diameter and water content) areinterred within nearly uniform sandy soils at a predetermined depth. Such studies can be complemented by forward modeling. Typically, the principal input parameters for GPR simulators such as those for GprMax by Giannopoulos(25) include parameters pertaining to the setup of the GPR system, the geometric configuration of the simulation scenario, and the electromagnetic attributes of the involved media. These parameters can either be ascertained directly based on the experimental design or deduced computationally in light of the condition of roots and soil. In the absence of constraints imposed by sample size, forward simulations can yield conclusions with more compelling evidence of underlying physical mechanisms and predictive capabilities.
The integration of GPR with unmanned aerial vehicles (UAVs) or terrestrial robots heralds an era of automatization in the data acquisition process, particularly within regions that are either inaccessible or fraught with peril. Such technology is especially instrumental for swiftly and safely detecting concealed menaces, such as landmines and Improvised Explosive Devices (IEDs). In stark contrast to alternate sensors like metal detectors or magnetometers, GPR is competent in discerning both metallic and non- metallic targets simultaneously.(26)
The scientific community has recently manifested considerable interest in UAV-based GPR systems due to substantial advancements in UAV functionalities along with a noteworthy reduction in costs and maintenance operations.(27) Nonetheless, given that these platforms are designed to be lightweight and compact, there exists an inherent limitation in the maximum effective payload mass.(28) Indeed, the design phase necessitates a series of compromises concerning the radar technology, the assortment and variety of GPR antennas, the navigational instruments, as well as the battery life. The current cutting-edge development is the Ultra-Wideband (UWB) GPR system, an innovation of 2018 stemming from a collaboration between the University of Ulm, Endress and Hauser GmbH, and the University of Applied Sciences and Arts Northwestern Switzerland.(29) This system is a compact and versatile UAV-borne radar, meticulously engineered for landmine detection. Comprising a DJI Matrice 600 Pro drone platform, a GPR system, a navigation control unit, and a data recorder, this technology extends the utility and domains of GPR applications. With data collection rendered more convenient and efficient, the deployment in the exploration of urban tree root systems stands to enhance efficiency and reduce operational costs.
Synthetic Aperture Radar (SAR) Combined with GPR Fusion Technology: the integration and collaborative detection represent significant trajectories for the advancement of GPR systems, which, when synergized with other geophysical exploration technologies such as seismic and electromagnetic detection, yield a more comprehensive subsurface profile. Furthermore, developing integrated approaches with UAV and satellite remote sensing data marks another pivotal direction. For instance, the Imaging Radar designed and developed by the Fraunhofer Institute for High Frequency Physics and Radar Techniques (FHR) specifically for UAV platforms, known as the Airborne Radar for Terrain and Object Recognition in a Netted Observation (ARTINO),(30) is employed for three-dimensional imaging and nadir point observation. This system amalgamates a true aperture enabled by a nadir-pointing linear antenna array, employed in a bathymetric mode, with SAR techniques, thereby reducing the radar’s power consumption and antenna dimensions. Tosti et al.(31) explored the fusion of GPR and SAR image data for the monitoring of transportation infrastructure, corroborating the feasibility of integrating Interferometric Synthetic Aperture Radar (InSAR) and GPR to surveil transport assets at a network scale. This verified the enhanced potential of InSAR and GPR modalities as both standalone and comprehensive measurement methodologies.
The development and innovation of GPR technology is an ongoing process, influenced by factors such as funding, policies, and technological constraints, which can impact the progress and practical applications of GPR technology. Future research and development are expected to adapt to emerging demands and challenges. With technological breakthroughs, the application domains of GPR will continue to expand.
CONCLUSIONS
Street trees are instrumental for community welfare, encompassing social, environmental, and economic benefits. The predominant root system type in urban street trees is tap rooted, amenable to GPR for coarse root detection. The viability and precision of this technology have been tested under various field conditions—predominantly within controlled environments or plantations—and across diverse vegetal species, focusing on arboreal root systems. To date, GPR has facilitated the identification of individual coarse roots and the mapping of root systems, including those under urban sidewalks. Coarse root diameters have been estimated using indices extracted from root system GPR radigrams. Over time, root development and distribution can be monitored via repeated GPR scans. Although GPR technology is not cost-effective, its application is warranted for valuable trees or insensitive areas where excavation is impracticable, such as trees rooted in close proximity to sidewalks, roads, buildings, or on unstable slopes, and might also be applicable in rapid screening programs for trees at risk of toppling. Continuous enhancements in GPR hardware design, data processing software, and root observation models augment the potential of this non-invasive technique in the study of coarse roots. Eventually, GPR may be regarded as a useful, non-destructive, and swift technological approach for assessing root location, root structure integrity, and, prospectively, the health of root systems.
BIBLIOGRAPHIC REFERENCE
1. Bi, L.Y., et al., Estimation of Coarse Root System Diameter Based on Ground-Penetrating Radar Forward Modeling. Forests, 2023. 14(7).
2. Ohashi, M., et al., Reconstruction of root systems in Cryptomeria japonica using root point coordinates and diameters. Planta, 2018. 249(2): p. 445-455.
3. Utsi, E., Ground-penetrating radar for archaeology. Lawrence B. Conyers. AltaMira Press, Walnut Creek, California, 2004. 203pp. ISBN 0- 759-10773-4. Archaeological Prospection, 2006. 13(3): p. 228- 229.
4. Goodman, D.J.A.P., Book review: Surface-penetrating radar. D. J. Daniels, ERA Technology, Institution of Electrical Engineers Radar Series no. 6, London, 1996. Price 85.00. ISBN 0-85296-862-0. 234×156 mm, hardback, many colour illustrations, 320 pp. 1997. 4.
5. Cimadevila, H.L., et al., Forestry applications of ground- penetrating radar. 2010. 19(1).
6. Attia al Hagrey, S., Geophysical imaging of root-zone, trunk, and moisture heterogeneity. Journal of Experimental Botany, 2007. 58(4): p. 839-854.
7. Cui, X., et al., Modeling tree root diameter and biomass by ground-penetrating radar. Science China Earth Sciences, 2010. 54(5): p. 711-719.
8. Butnor, J.R., et al., Use of ground-penetrating radar to study tree roots in the southeastern United States. 2001. 21 17: p. 1269-78.
9. Barton, C.V.M. and K.D. Montagu, Detection of tree roots and determination of root diameters by ground penetrating radar under optimal conditions. Tree Physiology, 2004. 24(12): p. 1323- 1331.
10. Jol,H.M., Ground Penetrating Radar: Theory and Applications.2009: Ground Penetrating Radar: Theory and Applications.
11. Bassuk, N., et al., Ground-penetrating Radar Accurately Locates Tree Roots in Two Soil Media Under Pavement. Arboriculture & Urban Forestry, 2011. 37(4): p. 160- 166.
12. Nichols, P., A. McCallum, and T. Lucke, Using ground penetrating radar to locate and categorise tree roots under urban pavements. Urban Forestry & Urban Greening, 2017. 27: p. 9- 14.
13. Al-Qadi, I.L. and S. Lahouar, Measuring layer thicknesses with GPR – Theory to practice. Construction and Building Materials, 2005. 19(10): p. 763-772.
14. Guo,L., et al., Calibrating the impact of root orientation on root quantification using ground-penetrating radar. Plant and Soil, 2015. 395(1-2): p. 289-305.
15. Butnor, J.R., et al., Surface-based GPR underestimates below- stump root biomass. Plant and Soil, 2016. 402(1-2): p. 47-62.
16. Yamase, K., et al., Ground-penetrating radar estimates of tree root diameter and distribution under field conditions. 2018. 32: p. 1657- 1668.
17. Zajícová, K. and T.J.G. Chuman, Application of ground penetrating radar methods in soil studies: A review. 2019.
18. Hruska, J., J. Cermak, and S. Sustek, Mapping tree root systems with ground-penetrating radar. Tree physiology, 1999. 19(2): p. 125- 130.
19. Stokes, A., et al., An Evaluation of Different Methods to Investigate Root System Architecture of Urban Trees in Situ: I. Ground- Penetrating Radar. 2002.
20. Butnor, J.R., et al., Utility of Ground-Penetrating Radar as a Root Biomass Survey Tool in Forest Systems. Soil Science Society of America Journal, 2003. 67(5): p. 1607- 1615.
21. Dannoura, M., et al., Detection of<i>Cryptomeria japonica</i>roots with ground penetrating radar. Plant Biosystems - An International Journal Dealing with all Aspects of Plant Biology, 2008. 142(2): p. 375-380.
22. Hirano, Y., et al., Limiting factors in the detection of tree roots using ground-penetrating radar. Plant and Soil, 2008. 319(1-2): p. 15-24.
23. Stokes, A., et al., An evaluation of different methods to investigate root system architecture of urban trees in situ. I. Ground- penetrating radar. 2002. 28(1): p. 2- 10.
24. Stover, D.B., et al., Effect of elevated CO2 on coarse-root biomass in Florida scrub detected by ground-penetrating radar. 2007. 88 5: p. 1328-34.
25. Giannopoulos, A., Modelling ground penetrating radar by GprMax. Construction and Building Materials, 2005. 19(10): p. 755-762.
26. García-Fernández, M., et al., Improvements in GPR-SAR imaging focusing and detection capabilities of UAV-mounted GPR systems. ISPRS Journal of Photogrammetry and Remote Sensing, 2022. 189: p. 128- 142.
27. Noviello, C., et al., An Overview on Down-Looking UAV-Based GPR Systems. 2022. 14(14): p. 3245.
28. Yang, X. and X.J.H.T.f.P.G. Pei, Hybrid system for powering unmanned aerial vehicles: Demonstration and study cases. 2022.
29. Burr,R., et al., Design and Implementation of aFMCW GPR for UAV-based Mine Detection. 2018: p. 1-4.
30. Weiß, M. and J.H.G. Ender. A 3D imaging radar for small unmanned airplanes - ARTINO. 2005.
31. Tosti, F., et al., Transport infrastructure monitoring by data fusion of GPR and SAR imagery information. 2020. 45: p. 771-778.
FINANCING
No financing for the article.
CONFLICT OF INTEREST
The author declares that there is no conflict of interest in the work.
AUTHORSHIP CONTRIBUTION
Conceptualization: Chang Liu, Tianqing Ling.
Data curation: Chang Liu, Tianqing Ling.
Formal analysis: Chang Liu, Tianqing Ling.
Methodology: Chang Liu, Tianqing Ling.
Drafting - original draft: Chang Liu, Tianqing Ling.
Writing - proofreading and editing: Chang Liu, Tianqing Ling.